CPSC 4420 Operating Systems
About Me
Professor Craton
Anything you want to know?
Introductions
- Name
- Major(s)
- Favorite thing you did over break?
Syllabus
Quizzes
- Given regularly at beginning and end of class
- Should be easy for you
- Allow me to confirm that everyone is keeping up with course material
Labs
- Code-based labs that do not parse or compile will be awarded zero credit
- Outside resources are acceptable e.g. Stack Overflow, etc
- Help from peers is acceptable
- Your solution must be yours, and you must fully understand it
Lab Grading
- Most labs will be graded for correctness and code quality, as in other courses
- Labs may occasionally be graded orally at my discretion
1.2 What is an Operating System
What does the OS do?
- Handles concurrency to share hardware between tasks
- Manages interactions between tasks
- May support high-level interactions (files, etc)
- Connecting to other systems
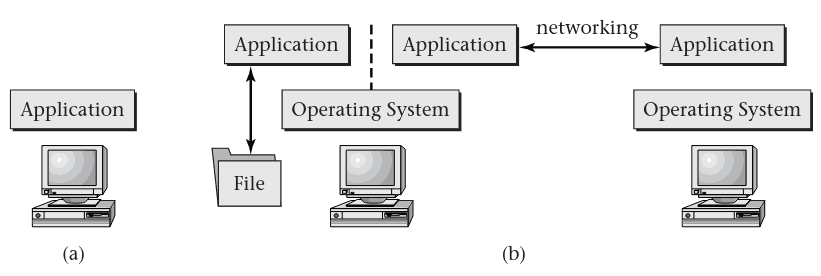
Can we have a computer without an operating system?
Abstraction
- Provides application programs with an abstract view of underlying hardware
- Manages low-level details
Application Programming Interface
- API
- All OS features made available to application programs
- Run programs, open files, create network connections, etc
Kernel
- Core of the operating system
- Provides programmatic interfaces
- Typically has no direct visibility from the user
Shell
- Provides a way for users to interact with the kernel
- Usually provides a way to start programs
sh,tcsh,bash
Desktop Environments
- Creates a graphical shell for the user
- Provides similar features to a text-based shell
KDE,GNOME,Explorer
C Language
Overview
- Developed in 1972 to create Unix utilities
- Unix kernel was re-implemented in C
- Most current operating system kernels are written in C (Linux, BSD, Windows, MacOS, iOS)
Features
- General purpose
- Procedural
- Statically typed
- Standardized language with many implementations
Why C?
- Low-level, portable language
Low-level
- Allows direct access to memory
- Allows assembly to be embedded
Portable
- Assembly targets a specific ISA
- C can be compiled for different architectures
- OS kernels can be run on x86 and ARM without as much modification
Simplicity
- C has a relatively small number of primitives
- Compilers can be small
C
Scope
- Provides lexical scope to eliminate global variables
- Functions exist in global namespace
- Functions may not be declared within other functions
Typing
- Variables are statically typed
- Type rules are weakly enforced
- Implicit conversions are possible
Running C Programs
- Compile to executable:
gcc source.c --output executable - Run the executable:
./executable tcccan compile and run C in one step:tcc -run source.c
Pointers
Pointers
- Provide references to memory
- Just an unsigned integer of the appropriate size
int *adefines pointera*bdereferencesb&creturns the address ofc
Displaying the address of a value
Dereferencing a pointer
#include <stdio.h>
int increment(int* value) {
*value += 1;
}
int main() {
int a = 1;
increment(&a);
printf("%d", a);
}Passing pointers
Files in C
What is a file?
- Resource for storing data
- Typically stored on persistent media (HDD, SSD, etc)
- Grouped together and organized as a file system
Organization
- Linux organization described in FHS
- Tree structure descending from root node
/
Virtual File Systems
- Used to read and write data from the kernel
/dev,/sys,/proc,/run- e.g.
cat /proc/loadavg
Using files
- Kernel provides system
calls (
open,read,write,close) - System call headers are available in the kernel source
- Files are accessed as streams of bytes
- Bytes are read and written starting from the beginning of the file by default
File API
openfile to get a file descriptor for the open filereadorwriteusing the file descriptorcloseto tell the kernel we are done with the file
Basic file reading
cat implementation
File permissions
- On Unix systems, files can be set as readable, writable, and executable
- These can be defined for the file owner, file owner group, and everyone
Permission encoding
- 3 bits
- Read (4)
- Write (2)
- Execute (1)
- 3 numbers used to store user, group, and world respectively
Example
- User read and write, group read, world read:
- 644
- User read, write, exec, group read and exec, world nothing
- 750
Modifying Permissions
chmod- change file mode bits
chmod 775 myfile.cchown- change file owner and group
chown user:group myfile.cchgrp- change group ownership
chgrp group myfile.ccp implementation
#include <unistd.h>
#include <stdlib.h>
#include <fcntl.h>
void main(int argc, char ** argv) {
if (argc != 3) exit(1);
int in = open(argv[1], O_RDONLY);
int out = open(argv[2], O_WRONLY|O_CREAT, 0644);
char buf[1024];
int bytes_read;
while (bytes_read = read(in, buf, 1024)) {
write(out, buf, bytes_read);
}
close(in);
close(out);
}C Types
Common types
int,char,floatunsigned int,long int- Pointers -
int*,char*
Other Types
- Arrays -
[1, 2, 3](essentially just pointers) structenum
Batteries not Included
- Most “complex” features are delegated to libraries
- The core language doesn’t support common types such as strings
- The standard library (written in C) is part of the standard and many implementations are available
Standard Library
- libc
- Many implementations available (BSD libc, glibc, MSVCRT.DLL, etc)
- Defines interfaces for strings, math, I/O, OS operations, and more
Hello World
unistd.h
- Not part of the C standard library
- Provides access to POSIX operating system API
- More info
Hello World
Format Strings
- Allow values of various types to be interpolated into strings
- Used by
printf,fprintf,scanf, and others
Functions
Make and GCC
Make
- Build automation tool
- Performs actions ordered by configured dependencies as defined in makefile
GCC
- GNU Compiler Collection
- Main compiler, linker, and assembler used for this class
- Free and open source optimizing compiler produced by the GNU project
What is GCC
- Just a program
How to use GCC
- Run it
- Enter
/usr/bin/gccin the shell. If the location of gcc is in yourPATH, you can simply typegccand the OS will resolve the full path.
Compiling Files
Compile source files into executable
> gcc src1.c src2.c --output executableHello, world
hello.c:
Compile
Preprocess, compile, assemble, and link our program to the file
hello
Run
We now have a new executable file. We can run it in the shell as:
More advanced operations
Compile source code into Assembler instructions:
Compile source code without linking:
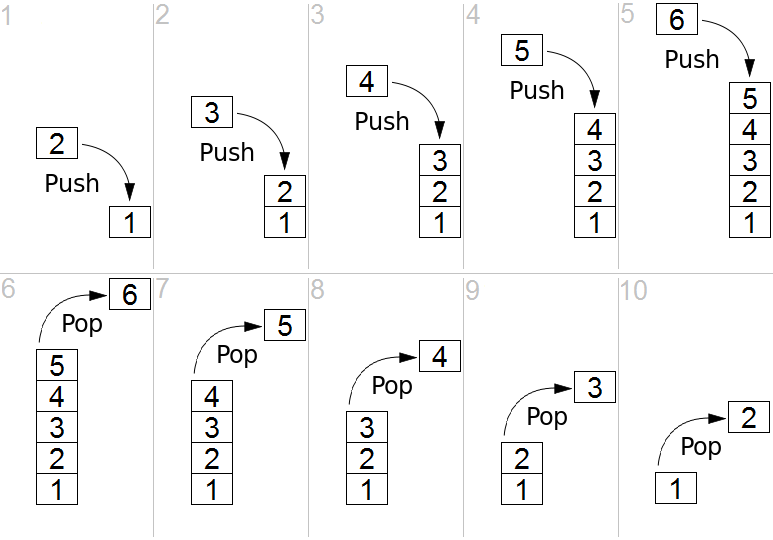
Appendix A - Stacks
Stack Data Structure
- Abstract data type
- Supports
pushandpop - Last in, first out (LIFO)

Control Abstraction
- Create organized sections of executable code that execute in well-understood ways and can be reused
Subroutine
- Performs operations for the caller while the caller waits
- Arguments, or actual parameters, are passed to subroutines and mapped to formal parameters from the subroutine definition
- Subroutines that can return values can be called functions
Call Stack
- Memory space for functions to use to store local variables, return addresses, and other data
- Function calls push a new frame to the stack
- Returns pop their frame when they are finished with it
DrawSquare Example

Call stack review resources
Parameter Passing
Pass by Value
- Actual parameter values are made available to the subroutine
- Modification of values will not impact the caller
- This may involve making a copy in memory
Pass by Reference
- Actual parameters are references to data from the caller
- Modification of values will impact the caller
- Should not involve copying data
C
- Pass by value
- If we want to be able to modify values, we need to pass values by reference
- We can’t do this in C, but we can use pointers passed by value to emulate it
If we allow C++, we can use a proper pass by reference mode.
Hardware
- Most ISAs pass values using a new stack frame and/or shared registers
- Hardware is necessarily pass by value
- Any pass by reference implementation needs to be built on values
Variable Numbers of Arguments
- It can sometimes be helpful to accept a different number of arguments
- One example of this is
printfin C
Function Returns
- End the function
- Return some value
Booting
Execution
- A CPU loads the next instruction from memory
- This instruction is executed
- This process repeats
Where does the first instruction come from?
Volatility
- Most operating systems are stored in non-volatile memory
- CPUs in most computers execute instructions from volatile memory
- A set of operations is needed to move the operating system to a location that is executable
First-stage boot loader
- Most modern systems include multiple stages of booting
- The first step typically involves loading and executing firmware from a dedicated storage device
- Examples include BIOS and UEFI
Second-stage boot loader
- The initial boot loader is usually tightly coupled to the device
- It is basic and has limited size
- It is used to load a more complete bootloader that loads the full OS
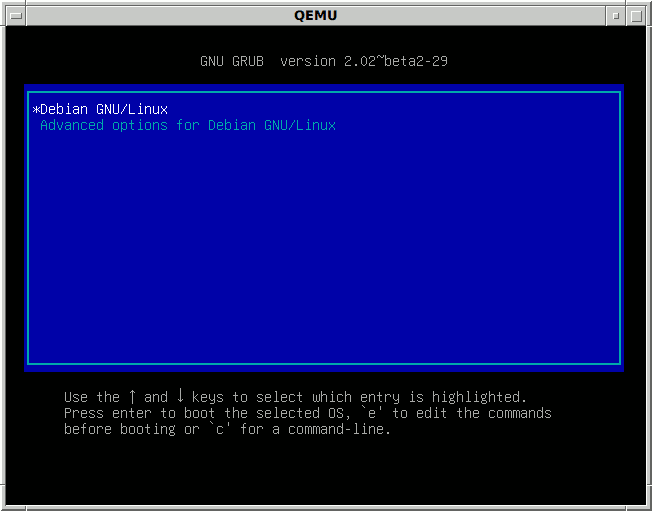
- Examples include GRUB, Syslinux, NTLDR, and BOOTMGR
GRUB
- Popular boot loader used with Linux systems
- Supports multiple operating systems
Kernel Initialization
- Bootloader transfers control to the kernel
- Kernel initializes memory and hardware
- Kernel mounts the root filesystem
- Kernel starts the first process

Uptime
Processes
- Running instances of programs
- Identified by a Process identifier
top
top can be used to show an interactive list of running
processes
Process Tree
PID 0
- PID 0 is not a regular process
- Created during kernel initialization
- Manages power when the CPU is not busy
PID 1
- PID 1 is the first user space process
- Commonly init or systemd
- Serves as the parent of all other processes
- Handles system shutdown and service management
Process Status
Kernel Log
- The kernel ring buffer contains messages from the kernel
- Useful for diagnosing hardware and boot issues
- Accessible via the filesystem at /dev/kmsg (requires root) or
dmesg
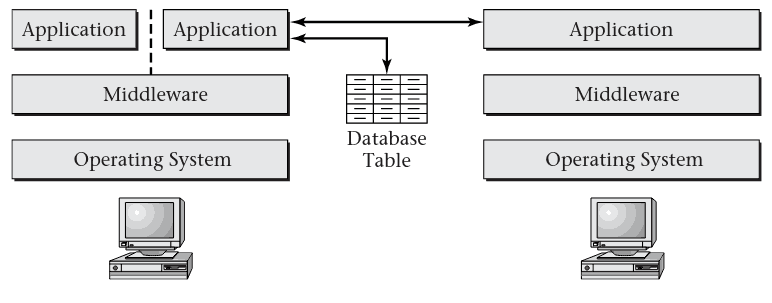
1.3 Middleware
Middleware
- Middleware is software that sits between application programs and the operating system
- Databases, Runtimes, etc
1.5 Multiple Computations on One Computer
Resources
- Limited CPU time, disk access bandwidth, memory bandwidth
- Multiple applications using resources simultaneously
Concurrency
- Make efficient use of resources
- When we aren’t actively using the CPU because we are waiting on I/O, another program can use it
Thread
- Fundamental unit of concurrency
- Sequence of programmed actions
- Each program includes at least one thread
Process
- Container for one or more threads
- Protects threads from interactions from unrelated threads running on the same computer
- Threads in different processes do not share memory

Thread APIs
- Create
- Kill
- Switch
Scheduling
- OS will have many threads that can be run
- Limited CPUs are available
- OS must select thread to run
1.6 Controlling Interactions Between Computations
Dependencies
- Sometimes threads are not fully independent
- One thread may generate data that another consumes
- These threads need to interact via synchronization
What if thread A is waiting for thread B and thread B is waiting for thread A?
Deadlock
- Cyclic waiting
- Must be addressed to prevent freezes
- Difficult to solve generally
Transaction
- Unit of computation with no externally visible internal state
- Computation succeeds or fails as a unit
- Useful concurrency primitive
Accidental Interaction
- Threads share memory, so they may interact unintentionally
- This can be mitigated on some systems using virtual memory
1.7 Supporting Interactions Across Time
Storage
- OS provides long-term storage for computation results
- Results can be retrieved for future computations
File system
- Named persistent storage
- Typically organized in a hierarchy
File access
- Accessed via OS APIs (
read,write) - May be mapped to memory space and accessed directly with
loadandstore
Databases
- Provide persistent storage
- Allows related data to be accessed easily
What if the system goes down during a write?
Crashes
- Any operation should be immediately interruptible without leaving persistent storage in a degraded state
- Atomic transactions and journaling may be a solution to this
1.8 Supporting Interactions Across Space
Networking
- Provides a means for separate systems to interact
- Network stack organized into layers
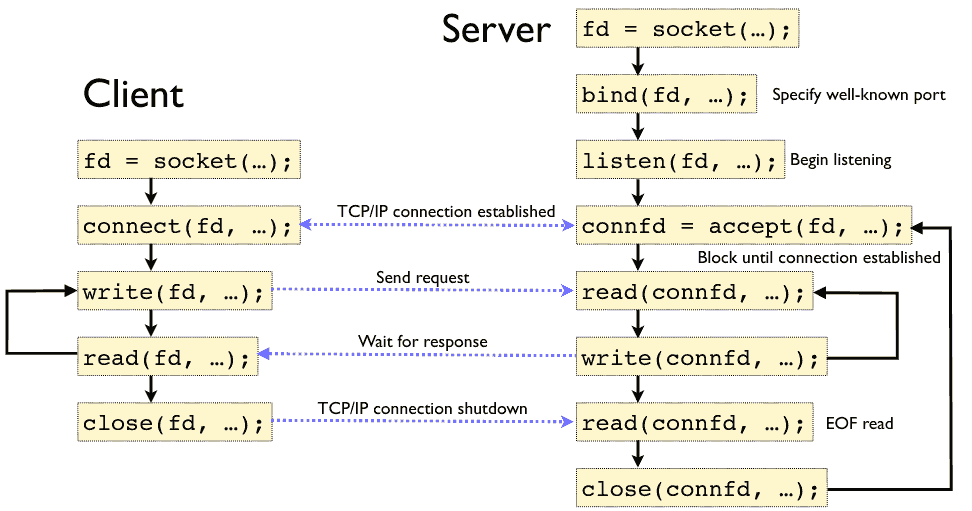
Sockets
- Provides a standard and consistent API for applications to use for networking
- Supports streaming and packet-based communication
Socket types
- Stream - provides a virtual circuit
- Datagram - delivers individual packets
Socket Implementation
- Independent of network type
- Most typically used with TCP/IP and UDP/IP
1.9 Security
Threats
- Operating systems need to be able to behave correctly in the face of malicious actors
Objectives
- Confidentiality
- Integrity
- Availability
- Accountability

2 Threads
2.2 Example Multi-threaded Program
2.1 Introduction to Threads
Thread
- A sequence of computational instructions run one after another
Single-threaded Programs
- Simple programs typically have only one thread
- Many programs you have written fall into this category
- They are easy to reason about and understand
Multi-threaded Programs
- Contain multiple threads of execution
- Are suitable for parallel processing tasks
- Make effective use of modern computer architectures

Programs and Threads
- Programs are a collection of instructions
- A thread is a collection of instructions being executed
- Every running program has at least one thread
Process
- Most operating systems implement a container to hold threads
- This container is called a process
Lifetime
- Threads exist from the time their first instruction begins executing until the time of last instruction execution
- Threads with overlapping lifetimes are running concurrently
- A key feature of most operating systems is to allow threads to run concurrently
2.3 Reasons for Concurrent Threads
Why is it desirable for the computer to execute multiple threads concurrently, rather than waiting for one to finish before starting another?
Responsiveness
- Allows rapid response to input even while working on other computations
- This is demonstrated by the example as both threads can respond to a timer
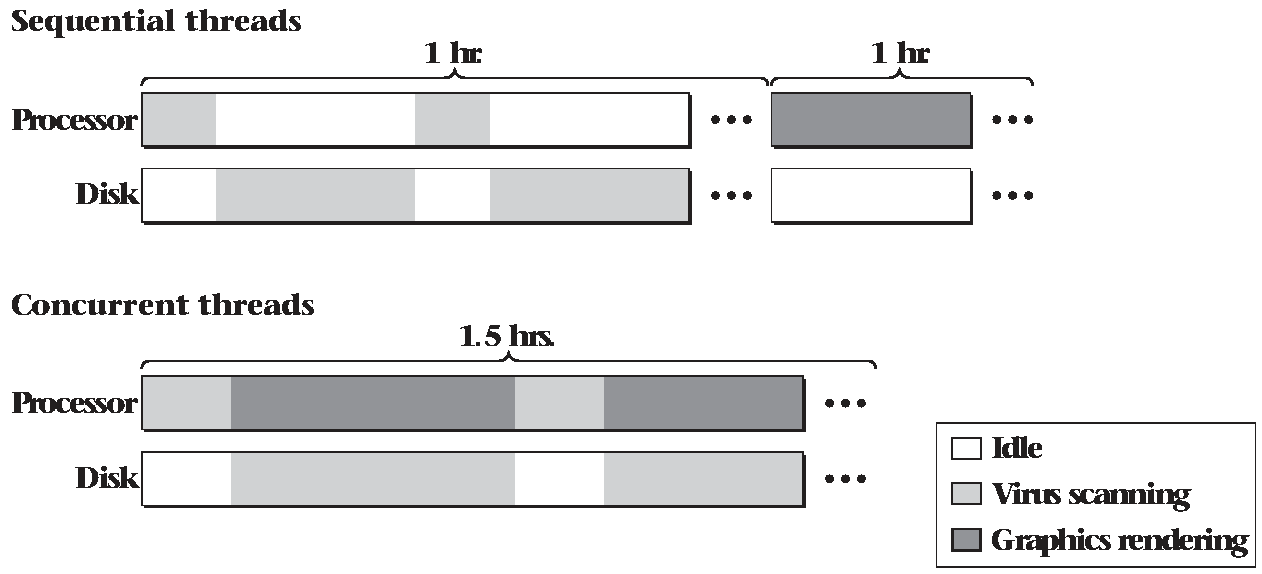
Resource Utilization
- The computer has many hardware resources (CPU, memory, disks, etc)
- We want to use all of these resources efficiently
- We need to be able to pause a thread waiting on I/O to allow the CPU to be used for other tasks
Modularization
- We may also like threads for creating cleaner programs
- Aspects of computation can be handled independently
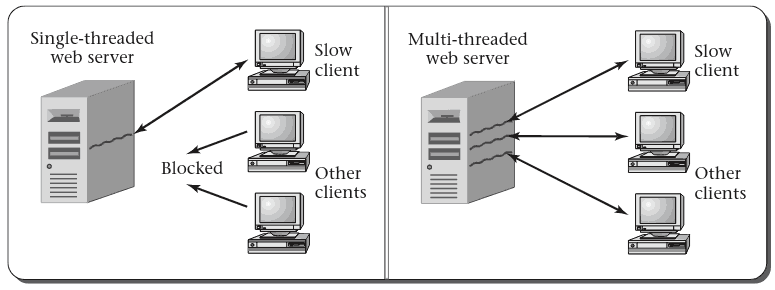
Web Server Example
- What does a web server do?
- How might threads help?
Multiprocessor Example
- Nearly all systems now have multiple processors
- How are threads useful here?
make -j
2.4 Switching Between Threads
Switching
- A single-threaded CPU can run only one thread at a time
- A multi-threaded CPU still supports a finite number of concurrent threads
- We need a mechanism for moving execution from one thread to another
Pausing
- Stop a sequence of instructions from running
- Start up again later
- Something else can use the CPU in between
Stopping Processes
- Stop the process:
kill -STOP [pid]
- Resume execution:
kill -CONT [pid]
New Instruction
- switchFromTo(currentThread, newThread)
- Instructs the CPU to move its execution from one thread to another
What does it mean to switch threads?
Consider:
- Instruction Pointer
- Stack Pointer
- Register Values
Changing Threads
- Store all required registers (IP, SP, data registers, etc)
- Update instruction pointer
Thread Control Block
- TCB
- Kernel data structure for storing thread parameters
- Address of block may be used to identify threads
What about memory
- Each thread’s memory should remain accessible and largely unchanged after switching
- The stack should be preserved exactly
- The stack is pushed to hold thread state when switching just like when calling a function
Pseudocode
Push registers to outgoing thread's stack
Store stack pointer in outgoing->sp
Load stack pointer from next->sp
Store `restore` address into outgoing->ip
Jump to next->ip
restore:
pop registers from the now resumed outgoing thread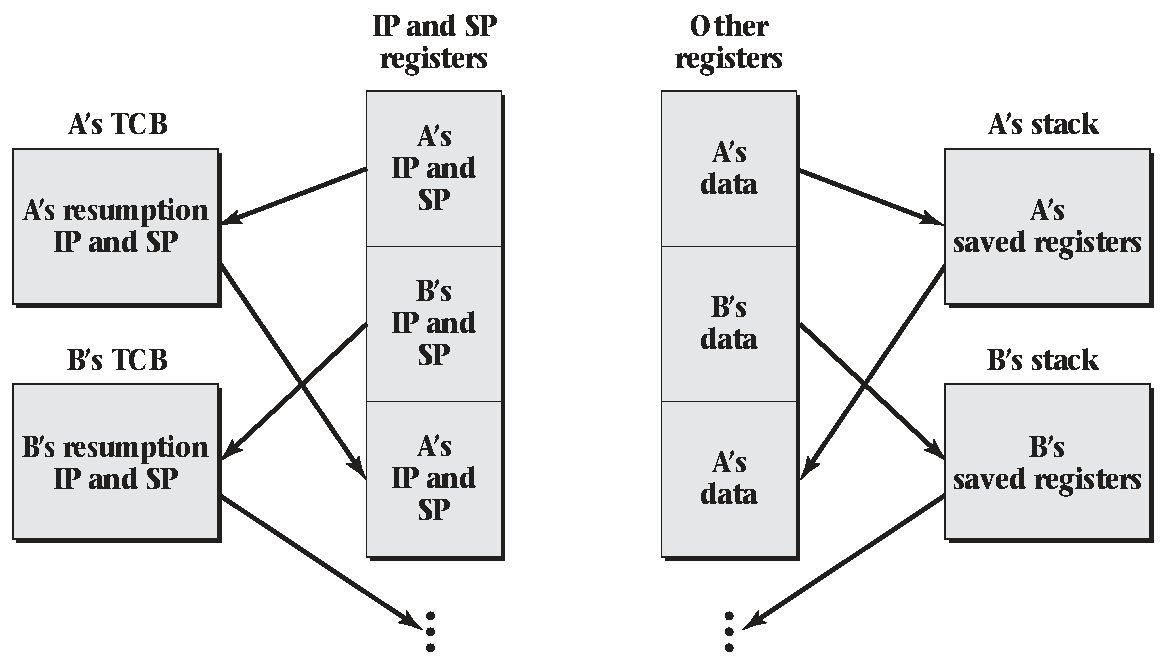
Security
- On most systems, memory protections are enforced
- A process can’t jump into another process’s memory
- The user-mode thread switching described is not possible in practice
Kernel
- The kernel must be responsible for thread management and switching
Yield
- Simplified version of
switchFromTo - Take no parameters
- Informs the kernel that the current thread is ready to take a break
Yield Implementation
outgoing = current
next = chooseNextThread()
current = next // Maintain global variable
switchFromTo(outgoing, next)Multiple processors
- A modern system can run multiple threads simultaneously in hardware
- We need to maintain information about the
nrunning threads on ournprocessors - When a thread yields on one CPU, we can begin running a new thread there
Fork
Process
- Closest to the informal idea of a running program
Process
- One or more threads
- Virtual memory accessible to those threads
- Other access rights
- Resource allocation context
- Other context (e.g. working directory)
Process Identification
- Each process has a process ID number (PID)
- All PIDs are positive integers
Process Creation
- Processes are created as a
forkof another - The only exception is the initial process created by the OS on boot
Fork
- The
forksystem call can be called from a thread to create a new process - The parent calling
forksees the process ID of the child as a return value - The child process sees a return value of 0
- The child process is otherwise an exact copy of the parent
Memory
- A forked process sees a copy of its parent’s memory
- Clobbering another process’s memory is not possible
- Communication via memory modification is not available
Signals
- We need a way to communicate between processes
- One way to do this is to send signals
2.5 Pre-emptive multitasking
Cooperative Multitasking
- Threads run until they yield time back to the OS
What are some issues with cooperative multitasking?
Cooperative Multitasking Issues
- One thread may not be as cooperative and hog time from others
- The OS doesn’t know when it will next have CPU time to perform device I/O
Pre-emptive Multitasking
- Allows the OS to take control and switch to another thread
Interrupts
- CPUs generally execute the next instruction
- Devices have the ability to interrupt this flow and redirect execution to an interrupt handler
- Using timer and interrupt handlers, the OS can implement pre-emptive multitasking
2.6 Security and Threads
DoS
- One thread hogs execution preventing the system from running properly
Race Conditions
- If not programmed carefully, threads can lead to undefined and unexpected behavior
- This behavior can sometimes be exploitable by an attacker
3.1 - 3.2 Thread States
Threads
- A sequence of computational instructions run one after another
- Requires OS-level management for runtime data
Thread Switching
- A thread can ask the OS to run another thread by calling
yield() - The OS may take control of the CPU using pre-emptive multitasking
How does the OS determine which thread to switch to?
Scheduling
- OS determines which process to run next
- Decision should be based on what the users of the system need
- Should optimize resource use
Waiting Threads
- Threads may be blocked waiting for I/O
- e.g. a webserver waiting on a disk access
Busy Waiting
- Loop until the task is complete, checking frequently
- Wastes CPU time that could be used by other threads
- OS should implement a better mechanism
Queues
- Run queue - Queue of threads that can be run now
- Wait queue - Queue of threads waiting on something
- 1 queue per wait reason
3.4 Fixed-priority scheduling
Scheduling Mechanisms
- Priority
- Fixed Priority (3.4)
- Dynamic Priority
- Earliest Deadline First (3.5.1)
- Decay Usage (3.5.2)
- Proportional Share (3.6)
Priority
- Number assigned to each thread
- May be assigned by a user and not adjusted automatically by the OS
- Note that higher priorities may be represented by lower numbers
Scheduling
- The runnable thread with the highest priority will be run next
Advantages
- Incredibly simple
- Can help meet some limited user needs
What are some weaknesses of fixed-priority scheduling?
Implementation
- Priority queue
- Most simply, a queue for each priority level
Ties
- Option 1 - Keep running the current thread (FIFO)
- Option 2 - Cycle highest priority thread in round-robin fashion (RR)
FIFO
- Allows the thread to complete its work fastest
- Does not allow any other high priority threads to run
RR
- Allows all highest priority threads to run
- Delays work on one thread to service others
Niche
- A busy high priority thread will consume all system resources
- In a carefully controlled system, they can be useful
Hard-real-time systems
- Data and computation must be completed on a fixed timetable
- Aircraft
- Control systems
- Rockets
Theorems
- Liu and Layland 1973
- Simplify the process of analyzing systems with real-time constraints
Rate-monotonic scheduling
If the threads will meet their deadlines under any fixed priority assignment, then they will do so under an assignment that prioritizes threads with shorter periods over those with longer periods.
Starting Together
To check that deadlines are met, it suffices to consider the worst-case situation, which is that all the threads’ periods start at the same moment.
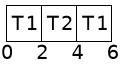
Gantt Chart
- Bar representing passage of time
- Can be used to analyze feasibility of a real-time schedule

Example
- Thread 1
- Period and deadline: 4 seconds
- Worst-case execution time: 2 seconds
- Thread 2
- Period and deadline: 6 seconds
- Worst-case execution time: 3 seconds
Can this application be serviced on a single CPU using fixed-priority scheduling?
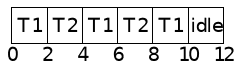
Example 2
- Thread 1
- Period and deadline: 4 seconds
- Worst-case execution time: 2 seconds
- Thread 2
- Period and deadline: 6 seconds
- Worst-case execution time: 2 seconds
3.3 Scheduling Goals
Scheduling
- Optimize system resources
- Provide snappy user experience

System Usage
- Many consumer devices (laptops, phones, etc) are idle most of the time
- Servers in data centers often have a backlog of work to do
Performance Goals
- Throughput
- Response time
Throughput
- Measure of work done per time
- An example would be requests per second (RPS) for a webserver
- Typically goes down as we change threads more quickly
Context Switching
- Changing threads incurs a cost
- State has to be saved to memory when pausing a thread
- State has to be loaded from memory when resuming a thread
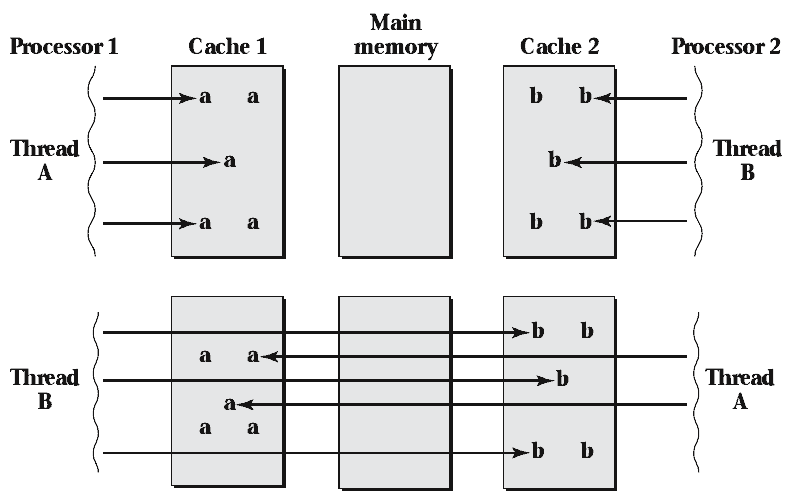
What impact does the cache hierarchy have on context switching?
Cache Hierarchy
- The implementation of the cache hierarchy makes context switching more expensive
- Another thread will replace many of our cached values
How does this change in multiprocessor systems?
Multiprocessor Systems
- A context switch to another CPU will be much slower
- The thread’s old cache will be inaccessible from the new CPU
- Processor affinity is helpful to keep threads running on the same CPU
Cache Coherence Protocol
- Values that exist in another CPU’s cache are especially slow to access
- This further increases the cost of context switches to another CPU
Response Time
- Time to service a single request
- Typically goes down the faster we change contexts
Control Goals
- Urgency
- Importance
- Resource allocation
Urgency
- How soon a task needs to be completed
- A homework assignment with a due date
- A VOIP packet to send
Importance
- How critical the task is to complete
- Your graduation application
Urgency and Importance
- Orthogonal concepts
- A task can be urgent without being import or important without being urgent
Resource allocation
- How to split resources between users
Scheduling Goals
- Performance
- Throughput
- Response Time
- Control
- Urgency
- Importance
- Resource allocation
3.5 Dynamic Priority Scheduling
Priority based scheduling
- Useful in limited circumstances
- Helpful as a framework for more advanced scheduling
- What if the OS could automatically adjust priorities?
Earliest Deadline First
- Useful in real-time applications with deadlines
- Assign highest priority to thread with the earliest deadline
- Improves upon rate-monotonic scheduling
Example Processes
| Process | Execution | Time Period |
|---|---|---|
| P1 | 1 | 8 |
| P2 | 2 | 5 |
| P3 | 4 | 10 |

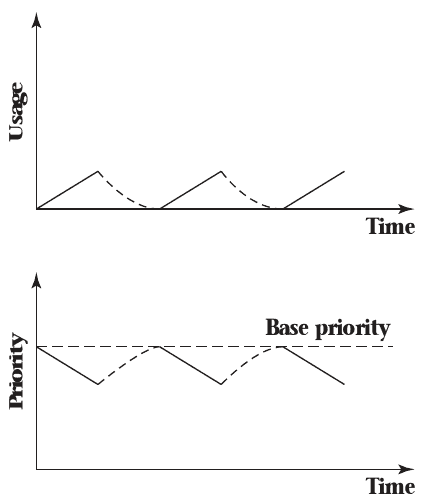
Decay Usage Scheduling
- Suitable for systems without deadlines
- Lower priority for threads that run more
- Allows quick, interactive tasks to execute instantly while moving compute-intensive tasks to the background
3.6 Proportional Share Scheduling
Fairness
- Equal sharing of resources my be more important than other factors
Goal
- Provide tunable fair sharing of resources between threads and/or system users
Mechanisms
- Lottery Scheduling
- Weighted Round-robin
- Weighted Fair Queuing
Lottery Scheduling
- Uniform time slices for all threads
- No formal rotation
- Next thread to run selected randomly using assigned weights
Lottery Scheduling
- Simple
- Technically correct in the long run
- May produce undesirable behavior in the short run
Weighted Round Robin
- Threads with larger allocations are assigned larger time slices
- Reduces context switches
Example
- Three threads (T1, T2, T3)
- Allocated resources in the proportions 3:2:1

Weighted Fair Queuing
- Threads with smaller allocation have to sit out on some rounds
- Keeps accumulated runtimes very close to desired proportions

Linux Example
nicevalues feed into schedulerrenicecan adjust niceness- renice -n {niceness} -p {pid}
Assembly
Introduction
- Tight coupling between code and machine instructions
- Not portable, code is written for a specific ISA
- Can be extremely efficient if optimized properly
Registers
- Internal CPU data storage
- Very limited in number
- Hold operands for asm instructions
Instructions
- Generally operate on registers
- May perform other functions
call,ret,syscall
ISA
- Instruction set architecture
- Set of instructions provided by a CPU
- Examples include
x86,x86_64,ARM, andARM64
System Call
- Used to run kernel code from userspace
syscallinstruction triggers kernel- Values are picked up from appropriate registers
System Call Registers
| Register | Purpose |
|---|---|
%rax |
System call number |
%rdi |
1st parameter |
%rsi |
2nd parameter |
%rdx |
3rd parameter |
%r10 |
4th parameter |
%r8 |
5th parameter |
%r9 |
6th parameter |
Functions
callandretperform jumps and adjust statepushandpopaccess stackraxregister is used for return value in x64 calling convention
Common Function Registers
| Register | Purpose |
|---|---|
%rax |
1st return register |
%rdi |
Used to pass 1st argument to functions |
%rsi |
Used to pass 2nd argument to functions |
%rdx |
Used to pass 3rd argument to functions |
%rcx |
Used to pass 4th argument to functions |
%rsp |
Stack pointer |
4.1 Synchronization and Deadlocks
Interaction
- We have seen how threads are created, scheduled, and executed
- The tools we have so far allow threads to run independently
- Sometimes threads have dependencies
Independent Execution
- Create threads
- Run independently
- Combine thread results
What if threads need to share data?
Memory
- A pointer to a memory location can be shared when creating a thread
- The thread can allocate memory and use stack allocated memory
- Global variables and data are accessible to all threads
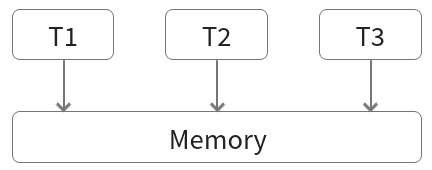
What behaviors do we need to avoid if we have shared memory?
4.2 Data Races and the Need for Mutual Exclusion

Thread Race Conditions
- Two threads may be operating concurrently in an unsyncronized manner
- This can lead to output that differs over different program runs
- This may lead to bugs or unexpected behavior
Example
Can the example sell more tickets than are available?
What if it is running in multiple threads?
Core Issue
- Multiple threads operating on the same data structure with interleaving modifications
Solution
- Allow only one thread to access the data at a time
- Sometimes referred to as locking the data structure
- This creates mutual exclusion (mutex)
Thread Safe Operations
- Only reading from shared data structure
- Interleaving operations without data dependencies
- Interleaving atomic operations
4.3 Mutexes and Monitors
Data Races
- Sharing data between threads can cause issues
- This can be resolved by using a lock to gain exclusive access
Mutual Exclusion Lock
- Provided by the OS
- Commonly known as a mutex
Mutex POSIX API
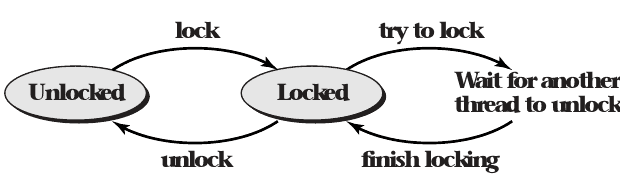
States
- Locked (held by some thread)
- Unlocked (not held by any thread)
Unlock Operation
- Only allowed when the mutex is locked
- Returns immediately
Lock Operation
- Allowed on locked and unlocked mutexes
- May force the caller to wait until the lock is unlocked by another thread
POSIX API
How do we build mutual exclusion?
Mutex Implementation
Exceptional Circumstances
- Unlocking an already unlocked mutex
- Unlocking a mutex locked by a different thread
- Locking a mutex that we already hold
Mutex Types
- PTHREAD_MUTEX_DEFAULT - Produces undefined behavior in exceptional cases
- PTHREAD_MUTEX_ERROR_CHECK - Error codes returned for exceptional cases
Mutex Types
- PTHREAD_MUTEX_NORMAL - Self-deadlocks are possible. Produces undefined behavior in other cases
- PTHREAD_MUTEX_RECURSIVE - A counter is used for lock state. A mutex can be locked multiple times and must be unlocked the same number of times before truly being unlocked
Monitors
- OOP approach to thread safety
- Provide more structured mutexes
Monitor Objects
- All state is private
- Objects include a mutex in addition to their state
- Every public method begins by locking the mutex and ends by unlocking it
Races
- A race on object state will be impossible if the object is a monitor
Language support
- Can be automatic (e.g.
class monitor) synchronizedkeyword provides object locking at the method level- Can be implemented manually
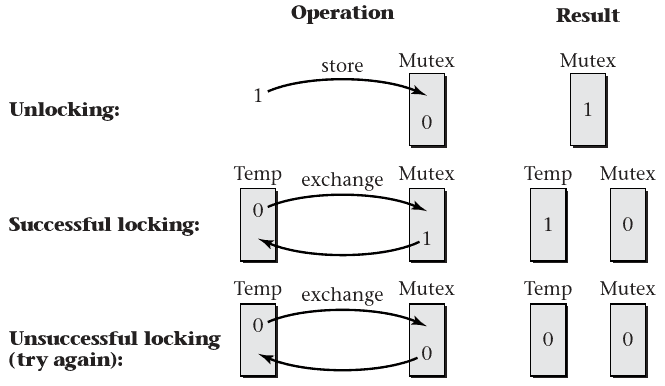
Mutex Implementation
- Atomic instruction is needed that can modify memory and report its previous value
swapto exchange a register value with memory is sufficient
Spinlock
- Memory value
1is unlocked,0is locked - Unlock by storing
1 - Lock by swapping
0with the mutex value- Locking succeeded if we get a
1back - Otherwise, try until we get a
1back
- Locking succeeded if we get a
Cache-conscious spinlocks
- Wait for another thread to change the lock state before atomically locking it
- Avoids poor cache performance while waiting
Spinlocks
- Explicitly waste CPU time
- Can be appropriate in the case where very little waiting is typically needed due to fast operations
- Does not require a system call
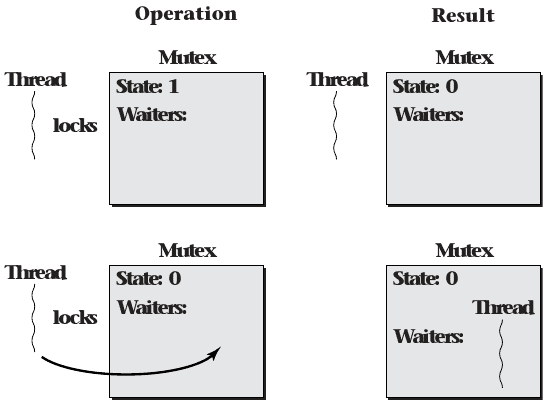
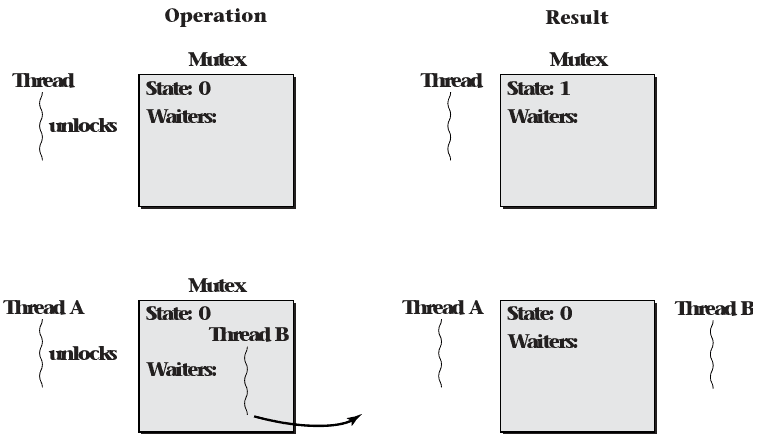
Queuing Mutex
- Avoids spinning
- Components
- Mutex state
- Wait queue for waiting threads
- Cache-conscious spinlock to protect own state
4.4 Synchronization Patterns
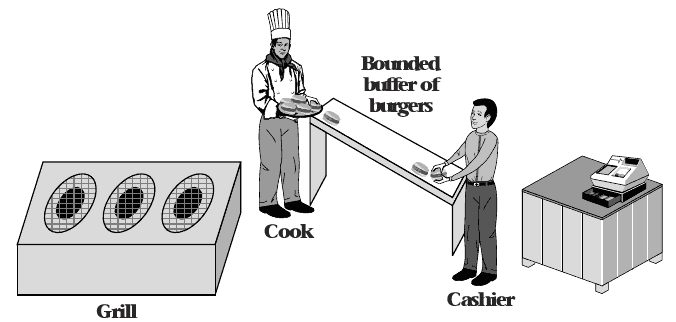
Producer-consumer model
- One thread produces data consumed by another thread
- Can be implemented sequentially
- Can be implemented as threads that wait on one another, but with limited concurrency
Concurrency
- Producer and consumer run at the same time
- Producer creates output and stores it
- Consumer grabs input as needed from storage
Bounded Buffer
- Provides storage space for producer output
- Limited in space because space is finite and larger size produces diminishing returns
- When buffer is empty, consumer must wait
- When buffer is full, producer must wait
Spin-waiting Producer
Spin-waiting Consumer
Pipes
- Provide OS-level support for bounded buffers between processes
du | sort -n
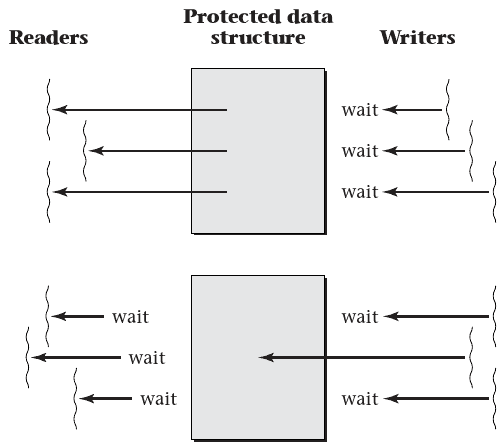
Readers/Writers Locks
- Alternative to mutex
- Allows lock to specify whether thread is reading or writing
- Only one writer may access the mutex at a time, but multiple readers are allowed
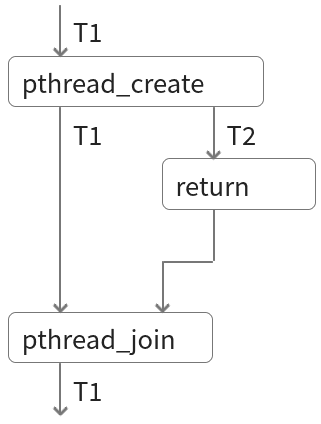
Barriers
- Requires multiple concurrent threads to finish a task before moving on
- Similar to our use
pthread_join, but does not require threads to terminate
Condition Variables
- Provide a way to bundle multiple threads waiting on the same condition
- A signaling mechanism is used to wake threads when the condition is met
Condition Variable Producer
Condition Variable Consumer
Semaphores
- Somewhat similar to a mutex, but can take on values other than 0 and 1
- A semaphore that uses only 0 and 1 is a mutex
- Larger counter values can be useful when implementing bounded buffers or other concurrency mechanisms
4.7 Deadlocks
Concurrency
- Addresses problems of responsiveness and throughput
- Creates problems with data races
- Races can be resolved using synchronization patterns
What problems can be caused by synchronization?
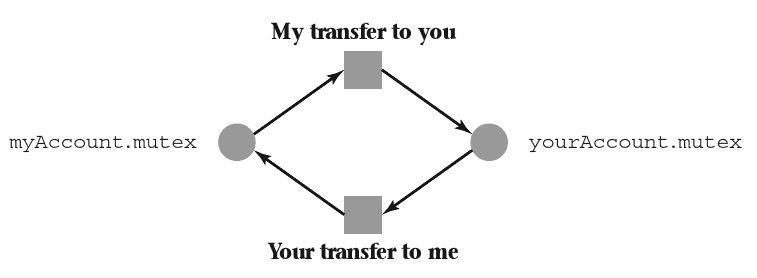
Example
Analysis
- Mutexes prevent race conditions
- Transfers will generally work correctly
- What if two accounts transfer to one another concurrently?
Deadlock
- Each thread locks the first mutex and waits for the second
- They now have a circular dependency and will never progress or unlock their mutex
Deadlock conditions
- Threads hold resources exclusively
- Threads hold some resources while waiting for others
- Resources cannot be removed from threads by force
- Threads wait in a circular chain
Addressing Deadlocks
- Detection and mitigation
- Prevention
Detection
- OS stores additional information about mutexes
- Track which thread holds a mutex
- Record which mutex a thread is waiting for
- Use this graph to periodically check for cycles (deadlocks)
Breaking the Deadlock
- A thread can be rolled back to before it attempted the offending lock
- Most systems don’t support rolling back threads
- Killing a thread is the typical solution
Immediate detection
- If we detect deadlock conditions when the last lock in the cycle is attempted, we can notify applications and they can choose to take appropriate action
Prevention Through Resource Ordering
- Requires resources to have global IDs
- When locking resources, lock them in order by ID
Example
Linux Scheduler Example
4.8 Interaction of Synchronization and Scheduling
Synchronization and Scheduling
- Scheduler determines which thread to run
- Synchronization actions performed by running threads determine which other threads are runnable
Priority Inversion
- Causes lower priority threads to be favored over higher priority threads
- Can occur when threads of different priorities share a mutex
Short-term example
- High priority thread waits on I/O
- Low priority runs and acquires mutex
- I/O completes and the high priority thread preempts the other
- High priority thread can’t acquire mutex
- Low priority thread resumes
Short term issues
- Generally not a significant problem
- Concurrent algorithms should be designed to only briefly hold a mutex
- High priority thread will resume promptly
Problematic Example
- High and medium threads both wait on I/O
- Low priority thread runs and acquires mutex
- All I/O completes and the high priority thread preempts the others
- The high priority thread cannot acquire the mutex and waits
- The medium priority thread runs and the low priority thread is unable to give up the mutex
Possible Solution
- Boost priority of lower priority threads that haven’t run much (e.g. decay usage scheduler)
- Creates problems on real-time systems where fixed priorities are desired
Priority Inheritance
- A lower priority thread borrows the higher priority of a thread that is waiting on it
- Similar ideas can be applied to other schedulers
Convoy Phenomenon
- A popular mutex may constantly be contested among a number of threads
- This creates a “convoy” of threads in the waiting queue
Convoy Issues
- Increased context switching due to most lock operations requiring a context switch
- Decreased throughput due to increase context switching
- Breakdown of scheduler prioritization as many threads are not runnable
- Mutex wait queue manages scheduling in practice
Solution
- Integrate the mutex wait queue with the scheduler and avoid simple FIFO behavior
- Allow a high-priority thread to relock a mutex it gives up even if other threads are waiting on it
4.10 Security and Synchronization
Policy vs Practice
- Some security flaws are due to improper policies implemented correctly
- Other flaws may be due to correct policies with buggy implementations
Synchronization Bugs
- Concurrency is hard, so programmers are likely to introduce bugs
- Race conditions are hard to test for, as the system will usually perform correctly
- Crackers may be able to induce race conditions more frequently than would naturally occur
- Race conditions can allow “impossible” situations and break through defenses
Time of check to time of use
- Class of bugs
- Involve checking for some condition and then using it in a concurrent system
- If the value changes between these points, security assumptions can be violated
6.2 Uses for Virtual Memory
Memory Protection
- Shared memory creates concurrency challenges
- What if each thread had private memory?
Virtual Memory
- Provides memory privacy
- Can also be repurposed for many other uses
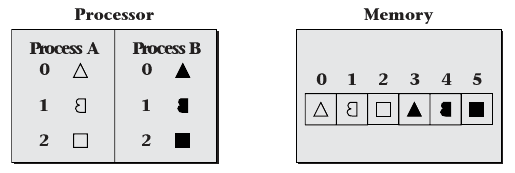
Addressing
- Addresses are used to look up memory locations
- Virtual memory decouples addresses that programs use to identify memory from physical memory locations
- Virtual addresses are used by software
- Physical addresses are real locations in hardware

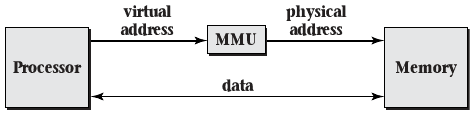
Address Mapping
- Load and store operations are given virtual addresses
- Memory management unit (MMU) is used to translate addresses
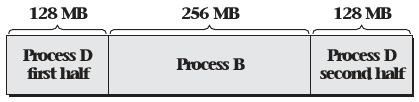
Virtual Memory Properties
- Virtual to physical mapping stored in a table to be general and configurable
- To keep table size manageable, addresses are grouped into pages
- Table contents are controlled by OS
- Table can be sparse. Undefined pages are illegal to use (page fault).
- Pages may have more granular permission (R/W)

Uses
- Private storage
- Controlled sharing
- Flexible allocation
- Sparse address spaces
- Persistence
- Demand-driven loading
- Efficient zero filling
- Substituting disk for RAM
Private Storage
- Each computation should be able to use whatever virtual addresses it finds most convenient for its objects, without needing to avoid using the same address as some other computation
- Each computation’s objects should be protected from accidental (or malicious) access by other computations
Process
- Group of one or more threads in a protection context
- Protection context is a broad idea. For now, it means an isolated virtual address space
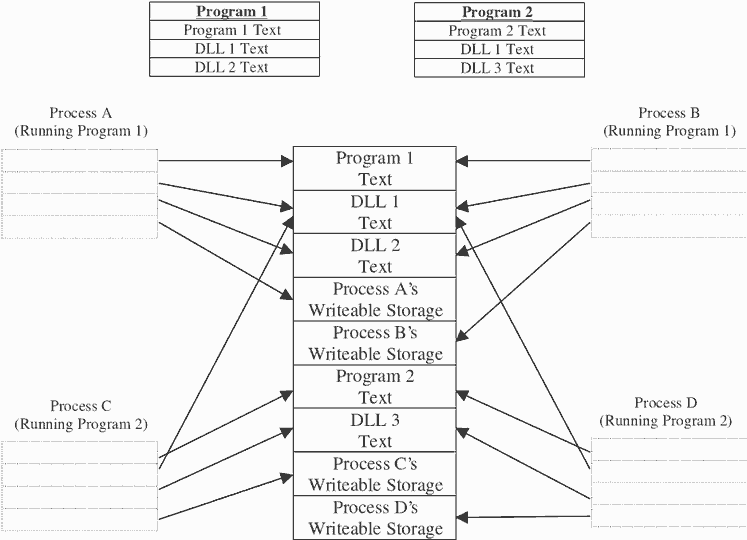
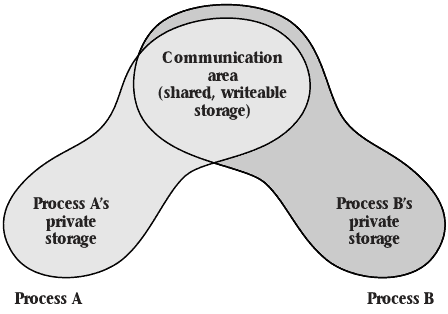
Controlled Sharing
- Certain memory areas can be shared by multiple processes
- Can facilitate communication
- Can reduce memory usage
6.2 Uses for Virtual Memory
Flexible Memory Allocation
- Virtual memory allows physical memory to be allocated and deallocated more freely
- A single process can be allocated pages from all over physical memory
- These pages appear as a single unified (and often contiguous) address space
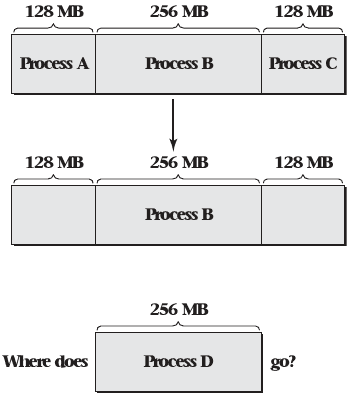
Sparse Address Spaces
- Processes need not have all addresses mapped
- This can allow data structure space to grow without wasting memory

Persistence
- Memory addresses don’t have to correspond to physical memory
- The OS may provide the ability to map a persistent storage medium to a process address space
Demand Driven Loading
- Many programs are large
- Conceptually, these programs need to be loaded before being run
- Virtual memory can be used to load portions of these programs as needed
Efficient Zero-filling
- Memory allocated to a process should be zeroed before use
- This task takes time
- An OS can avoid it by assigning copies of a read-only zeroed page to processes
- Pages can be swapped out when writes occur
Substituting Disk Storage for RAM
- Persistent storage is typically cheaper than RAM
- Virtual memory provides the tools to move rarely used memory pages to persistent storage
6.3 Virtual Memory Mechanisms
Mapping
- Should be configurable
- Should be efficient
- Mapping function for pages of addresses, not single addresses
Null mappings
- Virtual address pages may map to physical addresses
- They may also map to nothing at all
Hardware
- Dedicated hardware (MMU) implements mapping for performance reasons
- OS configures MMU with appropriate mappings
Page table storage
- Data structure may be stored in memory
- Using the structure from memory at least doubles the number of memory accesses. Why?
Locality
- Memory accesses exhibit spatial and temporal locality
- This can be exploited to create far more efficient memory access
Translation Lookaside Buffer
- MMU stores (caches) recently used translations
- Translation lookaside buffer (TLB) is used to improve performance
Caches
- Used to improve latency to access data
- Generally have an inverse relationship between latency and size
- That is, larger caches are necessarily slower
TLB
- Should be fast
- Should be large
- Can’t be both
Splitting TLB
- Using a separate TLB for instruction fetches and data loads improves performance
- Locality is improved
- Lookups can happen in parallel
- Caches can be smaller and therefore faster
TLB Hierarchy
- Just like other caches, architects can include multiple levels of TLB cache
- This ensures extremely fast performance in the common case
- This provides improved performance when the L1 misses and avoids some memory accesses
Combining Entries
- Often, systems will perform large allocations of many contiguous addresses
- We can eliminate the number of entries needed in the TLB by allowing a single entry to describe multiple contiguous mappings
Page Size
- Page size will have a strong impact on MMU and TLB latency
- Smaller pages require more entries
- Larger pages make less efficient use of space
- Variable size pages may provide benefits, but increase complexity
Performance Implications
- Programs that access memory sequentially will benefit from both TLB hits and data cache hits
- Dense data structures will perform much better than sparse ones
- Shorter programs and shorter jumps will see better TLB performance
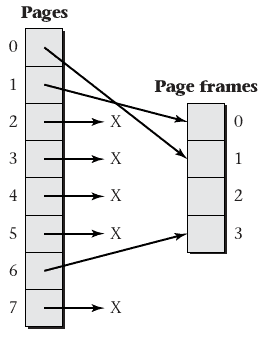
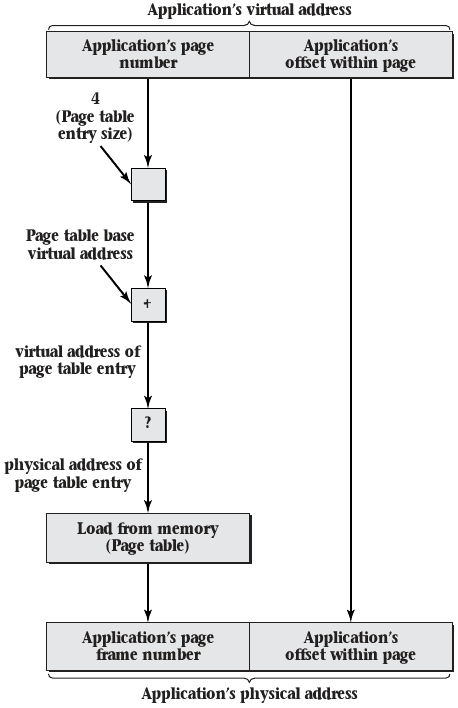
Hardware Support
- Common for MMU to expect page tables in a fixed format
- Register is used to tell the MMU where to look for the page table
- OS stores the page tables to memory and sets this register
Software-only
- MMU may simply send control to the OS on TLB miss
- OS returns memory mapping to be used and stored in TLB
- Provides slower performance on miss but enhanced flexibility for mapping storage and lookup
Context Switching
- Most processes need their own memory mapping and page table
- Context switches therefore put pressure on the MMU
- TLB needs to be flushed on switch, or entries need to be tagged with a process ID
Linear Page Tables
- Store page mapping in a simple array
- Easy to access and reason about
- Waste large amounts of space for largely sparse mapping
Sparse Addresses
- Most virtual addresses aren’t valid mappings
- Modern systems include 64 bit addresses
- Even using absurdly large page sizes in the GB range, multiple GB are still needed to store the page table for each process
Breaking the Page Table into Pages
- A large linear table can itself be broken into pages
- Only pages that include valid entries need to be stored
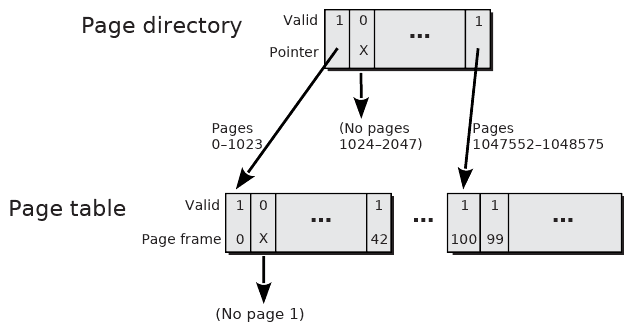
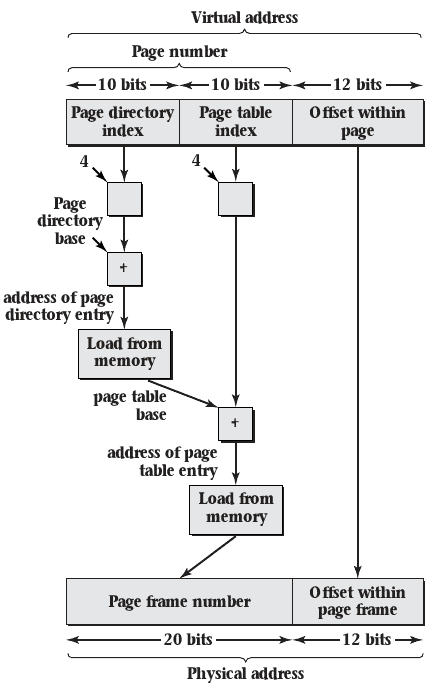
Two Level Page Table
- Explicitly store directory of pages as one page
- Store page tables as needed referenced from the directory
- Used by 32-bit Intel CPUs

Large Pages
- x86 implementation provides for skipping the page table entirely
- Directory entries include a size bit, which if set indicate a pointer to single large (4MiB) page frame
Multilevel page tables
- We can support larger addresses using more levels
- Modern 64-bit system often use 4 layer page tables

Hashed Page Tables
- Alternative to multilevel page tables
- Use a hash data structure in place of a tree
6.4 Policies for Virtual Memory
Policies
- Mechanisms for operations have been described
- When and how should these mechanisms be applied?
Questions
- At what point is a page assigned a page frame?
- Which page frame is assigned to each page?
- If the operating system needs to move some inactive page to disk in order to free up a page frame, which page does it choose?
Fetch Policy
- The OS may assign pages for all program data when a process is started
- The OS may wait for page faults before assigning any pages
- The OS may do something in between
Prepaging
- All pages are available without causing page faults
- Programs are slow to load, as all pages must be mapped before executing any code
Demand Paging
- Pages are loaded and mapped in response to page faults
- Does not waste time creating unused mappings
Choosing Demand Paging
- Limited spatial locality making page prediction difficult
- Low cost of page faults
Linux Example
- Uses demand paging for zero-filled pages because the cost for a fault is very low
- Uses a variant of prepaging for pages loaded from disk
- Uses demand paging for random access to memory-mapped files
Clustered Paging
- Page faults load a cluster of neighboring pages
- Linux defaults to loading 16 aligned pages surrounding the requested page
- Windows uses different cluster sizes for instructions and data
- Clustered paging provides benefit because disk access is typically latency bound rather than bandwidth bound
Placement Policy
- Determines where to place a frame
Placement Considerations
- Spatial locality for cache performance
- NUMA nodes
- Energy efficiency (allow some memory chips to enter low power states)
Caching
- Conflict (rather than capacity) misses can occur when addresses are poorly chosen
- Address coloring or bin hopping are techniques to help avoid an increase in conflict misses from virtual memory
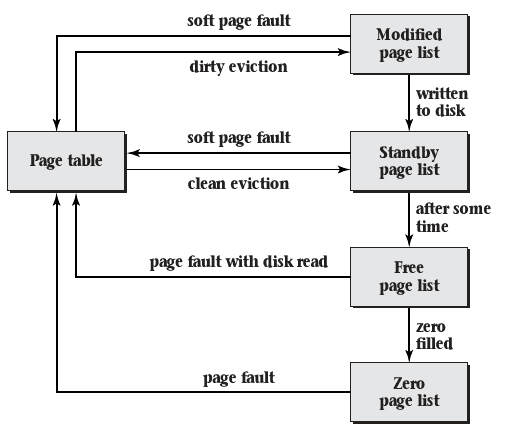
Replacement Policy
- Pages may be evicted from memory and stored to disk when memory space is limited
- This can happen as pages are requested
- Most operating systems choose to keep some number of pages available and perform evictions in the background
Advantages to early evictions
- Lower latency for applications that experience page faults
- Combining disk write back operations
- Page frames that have been marked freed can be reused if an application request them before they are handed over to a new application
6.5 Security and Virtual Memory
Processes
- Virtual memory provides basis for private process memory
- Security details are covered more deeply in the next chapter
Persistence
- Memory is often assumed to volatile
- Algorithms need to be able to store sensitive information, such as passwords, in memory while operating on them
- Swapping may cause this sensitive information to be written to disk and accessible to an attacker
mlock
- POSIX standard provides a family of procedures to prevent a page from being swapped to disk
- This prevents sensitive information from every being written to persistent storage
7.2 POSIX Process Management API
Process
- Closest to the informal idea of a running program
Process
- One or more threads
- Virtual memory accessible to those threads
- Other access rights
- Resource allocation context
- Other context (e.g. working directory)
Process Identification
- Each process has a process ID number (PID)
- All PIDs are positive integers


Process Creation
- Processes are created as a
forkof another - The only exception is the initial process created by the OS on boot
Fork
- The
forksystem call can be called from a thread to create a new process - The parent calling
forksees the process ID of the child as a return value - The child process sees a return value of 0
- The child process is otherwise an exact copy of the parent
Memory
- A process created using fork holds copies of all memory available to the parent process
- This memory is a copy
- Memory is not shared as with threads
Multiprocessing
- Can be used to improve performance of parallel computations
- Provides different characteristics than threads
Running new programs
execcan be used to cause a process to begin running a new program
Fork and Exec
forkcreates a copied processexeccan be used to cause only the child to run a new program
Killing processes
killcan be used to send a signal to a specified process
Kernel Fork Steps
Fork
- Requires the kernel to create a nearly identical replica of the calling process
- Involves several mechanical steps to ensure the new process has its own isolated memory and a properly initialized execution state
Finding a Process Slot
- The kernel must iterate through
ptableto find an entry where the state isP_FREE - Slot 0 is typically reserved for the kernel and is never used for a new process
Allocating a Page Table
- The kernel allocates a new page table for the child process using
kalloc_pagetable - This new page table must initially include the kernel’s identity mappings so that the child can still execute kernel code during system calls and interrupts
Copying Memory Content
- The kernel iterates through the parent’s virtual address space using
an iterator like
vmiter - For every page that is user-accessible (code, data, stack, and
heap):
- Allocate a new physical page
- Copy the data from the parent’s physical page to the child’s new physical page
- Map this new physical page into the child’s page table at the same virtual address used by the parent
Initializing the Execution State
- The child process must begin execution at the exact same point where
the parent called
fork - The kernel copies the saved register state from parent to child
Return Values
- To distinguish the two processes, the kernel modifies the return
value register in the child’s saved state
- On x86-64, this means setting
reg_raxto 0
- On x86-64, this means setting
- The parent’s return value is set to the PID of the child
Marking the Process as Runnable
- The process state is changed from
P_FREEtoP_RUNNABLE - On the next timer interrupt or schedule event, the kernel’s scheduler may select the child process to run
7.3 Protecting Memory
Virtual Memory
- Provides the framework for memory protection
- Different mapping can be used for different processes
- Mappings can include memory permission bits
Processor Modes
- Code running as part of a user application may only access its own memory (user mode)
- Code running as part of the OS needs access to everything (kernel mode)
Kernel Mode
- All instructions are available
- I/O
- Change modes
- Change memory permissions
User Mode
- Normal instructions are usable
- Privileged instructions will fail
- Illegal instructions are caught by the OS (trap)
System Calls
- Effectively illegal operations
- OS traps the call and performs some requested operation
- Control typically returns to the process that requested the system call
Threads
- Can be implemented differently based on protection level and mode switch
- Kernel thread - run and scheduled in kernel mode
- Native thread (or just thread) - run in user mode, scheduled in kernel mode
- User thread - run and scheduled in user mode
Multiple Address Spaces
- Each process has its own virtual address space
- Used by OS X, Windows, Linux, etc
- Memory mappings are used to control permissions and access
7.4 Representing Access Rights
Protection system
- Controls access to objects by subjects
- Object is what is being protected
- Subject is trying to access the object
Operations
- Associated with an object
- Can be performed by a subject
Access Right
- Permission for a subject to perform an operation on an object
Principal
- Rights are attached to subjects (active users)
- A principal (often a user) is used to determine appropriate rights
- Processes may be the subject, but their rights reflect those of the user that owns them
Capabilities
- Indirect reference to object
- Includes information needed to locate object and a set of access rights
- Also known as handles (Windows) and descriptors (POSIX)
Access Control List
- List of access rights associated with an object
Example
> getfacl /bin/ls
# file: bin/ls
# owner: root
# group: root
user::rwx
group::r-x
other::r-x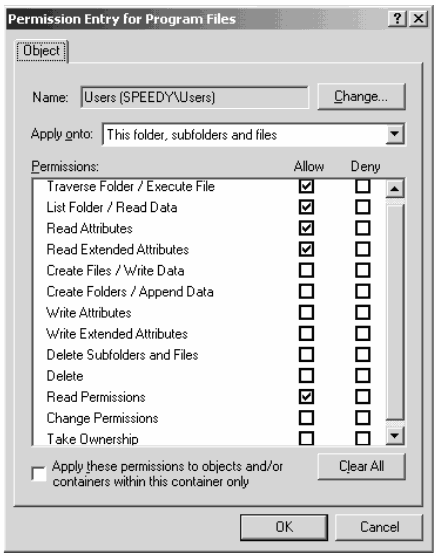
POSIX file permissions
r- Readw- Writex- Execute
POSIX directory permissions
r- Listw- Create/rename/delete files in directoryx- Traverse a directory (access files if name already known)- Common combinations are
rwx,r-x, and---
Security and Protection
- Protection is essential for security, but it is not equivalent to security
- ACLs and other measures must be applied carefully and correctly to provide security
Users and processes
- Processes are run using user credentials
- They may take actions that a user did not intend
- An example is a Trojan horse program
Worms
- Trojan horse programs that execute malicious code and redistribute themselves to others
- Often sent via email
setuid
- Some programs run by users need elevated permissions
- This can be achieved by allowing programs to run as the user who owns the program rather than the user who executes it
- These programs must be written carefully and securely to prevent these permissions from spilling over into child process or other operations
8.1 Files and Other Persistent Storage
Persistence
- Data stored in memory disappears on power failure or reboot
- The OS should provide a way to store data longer term
Access
- Provide a means to reference stored objects by name
- Objects could also be accessed by contents
Files
- Blend persistence and access
Common forms of persistent storage
- File - Array of bytes
- Table - Array of typed data fields
- Persistent Object - Serialized data structure from a programming context
Common access services
- Hierarchical directories mapping names to objects
- Indexes providing access based on contents
8.2 Storage Technology
- The recent history of persistent storage has been dominated by spinning hard drives
- Solid-state drives have begun to replace spinning drives
Disk Drive
- Store data in 512 byte blobs called sectors (other sizes are possible)
- Conceptually, an array of sectors
- The processor can request that an ordered group of sectors be transferred to RAM or vice versa

Disk drive performance
- Linear reads are much faster than random reads
- Head seeking takes
- Rotational latency (waiting for the sector to arrive under the head) also adds to latency
- Reads should be queued on the drive to allow the drive to make correct performance decisions
SSDs
- Do not experience mechanical seeks or rotational latency
- Less penalty for random reads
- Generally lower latency and high bandwidth than spinning drives
- Currently more expensive per byte
8.3 POSIX File API
Standardization
- UNIX-like systems share the same standards (POSIX)
- POSIX is implemented by Unix systems, Mac OS, and Linux
Referencing files
- Files are commonly referenced by path name
- Files are also referenced by an integer called a file descriptor
File descriptor
- Integer
- References a files
- Can be obtained using
opensystem call
Other endpoints
- Descriptors are often used with persistent files
- They may also be used with other destination for input and output
- Examples include
stdout, sockets, and hardware devices
Inherited descriptors
- All processes inherit at least 3 file descriptors
- Standard input (0)
- Standard output (1)
- Standard error (2)
unistd.h
- Includes definitions for many POSIX API components
Redirection
- Standard input and output are generally the terminal
- They can be redirected elsewhere via the shell
Open
- Get a new file descriptor
- Requires filename and a mode to open a file
Modes
- O_WRONLY - Write only
- O_RDONLY - Read only
- O_RDWR - Read and write
- O_CREAT - Create file if not present
- O_TRUNC - Empty file before writing
Close
- Closes a file descriptor allowing the OS to free its memory
- All open descriptors are closed on program termination
Memory Mapped I/O
- Map a file to a processes virtual address space
- Loads and stores to memory provide random read and write access to the file
Issues with mmap
- No easy control over when updates become persistent
- There can be no write only permissions
- Implies that files size is known
Copying
readandwritecan be used to copy file sections to memorypreadandpwritework similarly, but require a position
Sequential operation
- Some descriptions (e.g. network sockets) only allow sequential operation
readandwritecan be used to copy data sequentially
Implicit position
readandwriteupdate a stored position in a filelseekcan be used to adjust this stored position
8.4 Disk Space Allocation
Virtual Memory
- Maps virtual address space to physical memory (typically DRAM)
- Storage is not persistent
- Mapping happens in chunks called pages
File System
- Maps positions in files to persistent storage (typically disks)
- Storage is persistent
- Mapping happens in chunks called blocks
Allocations
- Any block in a file could be mapped to any block on a disk
- Not all choices are equal
- Goal is to optimize space and time usage
Wasted Space
- Blocks are fixed sizes
- Using less than a full block of space creates unused space that can never be used
Internal Fragmentation
- Unusable space that is allocated, but not available for use
- Occurs in the empty space at the end of blocks
External Fragmentation
- Unusable space that is not allocated, but too small to be useful
- Occurs in the relatively small gaps between allocated blocks
Extents
- Contiguous chunks of files
Locality Guidelines
- Files should be broken into as few extents as possible
- If multiple extents are required, they should be as close as possible
- Files that are used together should be stored together
Locality Policies
- Assume files in a directory are used together and store them together
- Measure usage and assume that files that were accessed together with be accessed together in the future
Tracking Allocations
- Many implementations
- ext3 stores a bit representing free or used for each block group
- Each block group contains a similar mapping for its blocks
Allocation Policies
- Files in a directory will often be stored in a block group to improve locality
- Subdirectories are often stored in new block groups
Delayed Allocation
- File size is not generally known at creation time
- Writes to files are buffered to RAM before being written to disk
- The OS may choose to buffer many writes in order to determine appropriate file size before performing allocation
8.5 Metadata
Metadata
- Data about data
- Information about where block of a file are stored
- File access control
- Dates and times
File Names
- Not really metadata
- Names provide a reference to a file
- Names are not a property of a file
- Multiple names can point to the same file
Data Location Metadata
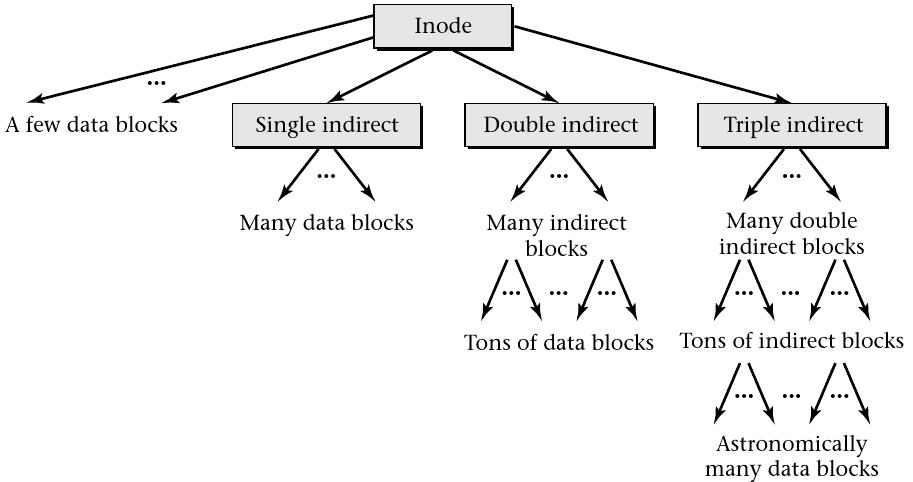
- ext3 stores file metadata in blocks called inodes
- Each inode stores file metadata including data locations
- inodes are stored in a linear array
- Each file has a unique inode
Sparse Files
- It is not necessary for empty blocks to be backed by actual storage
- A large file used sparsely need not take up the full file size on disk
Example
> dd if=/dev/zero of=sparsefile count=0 bs=4k seek=1000000000
> ls -s sparsefile
0 -rw-rw-r-- 1 jncraton 3.8T Apr 6 09:11 sparsefilePOSIX Metadata
- Owner (number)
- Group (number)
- File mode (9 permission bits)
- Stored in inode
Other Metadata
- File size
- Modified, written, accessed times
- Count of names referencing this file
8.6 Directories and Indexing
Files
- Provide access to blobs of data
- Include names for easy access
- Stored in a hierarchy
Directories
- Provide hierarchical levels for storing files
- Each name in a director points to one file
- Names within a directory are unique
Unordered Linear List
- Simple
- Trivial O(1) modification
- O(n) lookup where n is number of files in directories
- Large number of files create inefficiency
Hash Tables
- O(1) lookup without collisions
- Does not provide a way to iterate names in order

B+-Tree
- Tree with large fan out to reduce number of lookups
- O(log n) search
- Internal nodes contain pointers to leaves and no values
- Nodes include links to next sibling to form a linked list
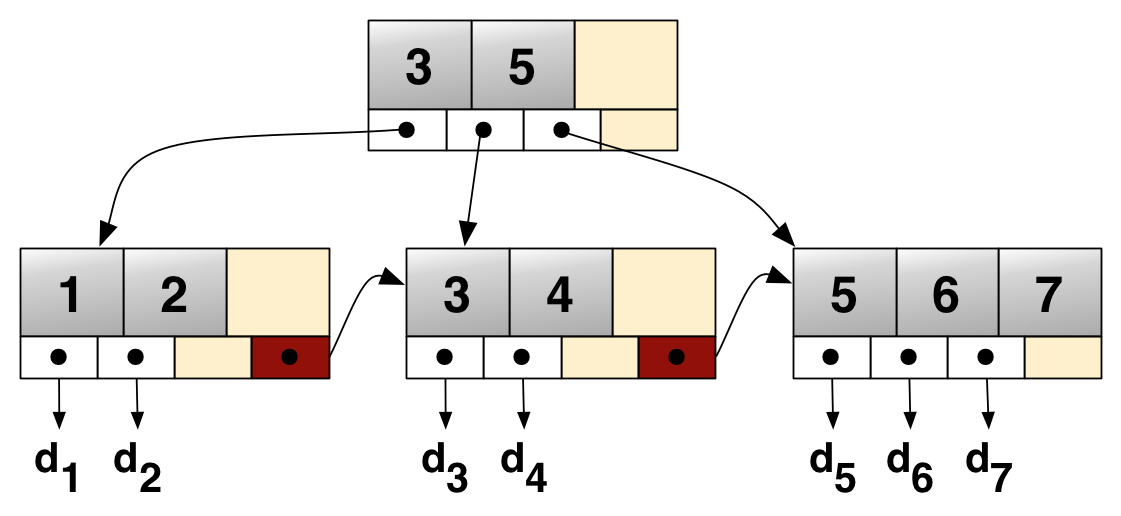
B+-Tree
- Commonly used for directory storage
- Used by NTFS (Microsoft), HFS (Apple), and XFS (open source)
8.7 Metadata Integrity
Buffering Writes
- Data to be written to disk is stored temporarily in RAM
- RAM loses state without power
- What happens to buffered writes when the system is power cycled?
Data Loss
- Buffered data will be lost
- Application programs need to be able to handle this
- Databases may solve this using a write-ahead log
Metadata Consistency
- Metadata must not become inconsistent
- Blocks that are in use must be marked as not available to others
- Blocks marked as in use should be pointed to by an inode
Irreparable Corruption
- Must be avoided
- Example is two files sharing an underlying data block
Noncritical Reparable Corruption
- Can be fixed after the fact
- Lost block in a single file
Critical Reparable Corruption
- Can be fixed after the fact
- Must be fixed before the system resumes it regular work
- Example is a block in use by a file but not marked as in-use
Consistency Strategies
- Journaling
- Shadow Paging
Journaling
- Each logical change is only a single block written to persistent storage
- This single block is the commit record for a transaction
- Partially complete transactions can be rolled back
- NTFS, HFS, ext3
Shadow Paging
- Creates new data structures instead of modifying existing structures
- Single block change updates pointer to current metadata structure
- ZFS, BTRFS
Snapshots
- If we select shadow paging, we can keep old metadata blocks around
- If we also create copies of blocks on write, we can cheaply store each state of the file system in time
- This can be very valuable in certain contexts
8.9 Security and Persistent Storage
Threat Model
- What are we trying to defend against?
- External vs internal attackers
- Physical access vs remote access
- Data loss vs data exfiltration
Encryption
- Data written to disk without encryption will be vulnerable to physical exfiltration
- This may be expensive
- This also applies to values in memory that have been swapped to disk
File Encryption
- Protect certain files from being accessed
- Does not protect swap
- Can lead to sensitive data being stored on the system
Full Disk Encryption
- FDE
- Encrypts all data on the drive
- Requires an encryption key in order to boot the system
Deleting Files
- In most file systems, data is left on a drive after file deletion
- Pointers to the file are what get removed
- File can be securely erased by overwriting their underlying data
- SSD data can’t be overwritten to wear level, but SSDs include a secure erase method